Updates for EZLogic - 1.59.1 (Ezlo Hubs only)
Link: https://ezlogic.mios.com/
Previous: Updates for EZLogic - 1.58.1 (Ezlo Hubs only)
Local MeshBot. Actions. Execution policies
We added execution policies to the Local MeshBot actions. There are two types of action execution rules:
Global - apply to all actions in an action group/scene.
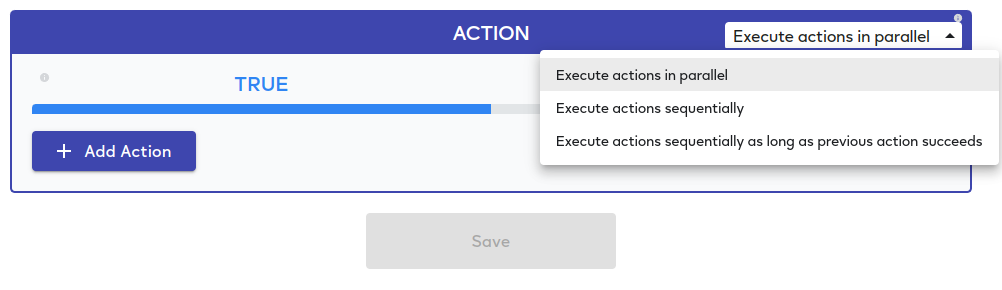
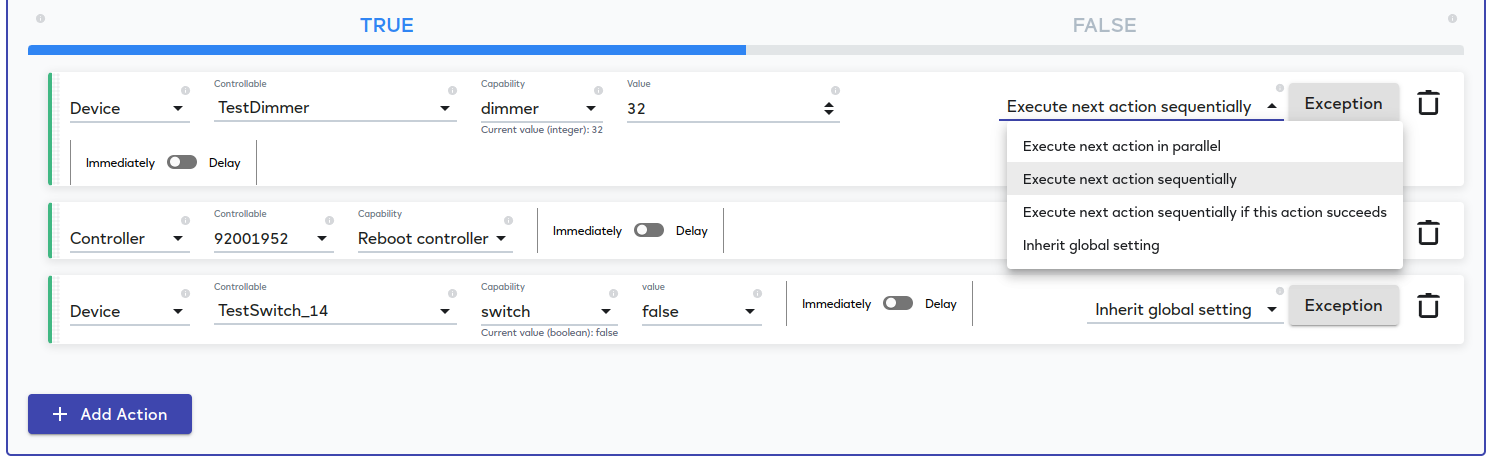
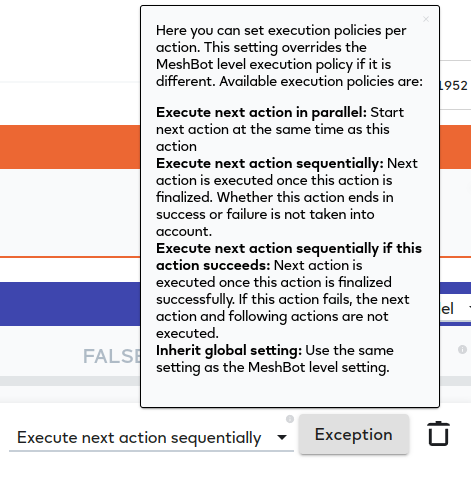
Individual Action - apply to specific actions in the group/scene.
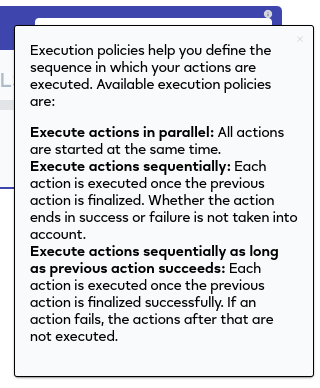
Available execution policies:
-
Execute in parallel:
1.1 EZLogic runs all actions independently.
1.2 The success or failure of an action in a group does not affect the running of another action.
1.3 EZLogic does not wait for (long-running) actions to complete before running the next action. -
Execute sequentially:
2.1) EZLogic runs all actions in order from top (first) to bottom (last).
2.2) EZLogic waits for the current action to complete before running the next action.
2.3) The success or failure of an action does not affect the running of the next action. -
Execute sequentially only if previous action succeeds:
3.1) EZLogic runs all actions in order from top (first) to bottom (last).
3.2) EZLogic waits for the current action to complete before running the next action.
3.3) EZLogic will only proceed to the next action IF the current action is successful. If an action fails then EZLogic will not run any actions that come after the failed action.
Notes:
- Individual rules supersede Global rules.
- The global rule applies to all actions that use ‘Inherit Global Settings’.
- You can drag and drop actions to rearrange them in the list (hold left-click on the left of the action box).
Fixes and Improvements:
- Localization for Dashboard.
- Fixed issue on IP Device template page.
- Added and improved translations on Plugins page.
- Fixed devices info popup for devices generated by plugins.
- Updated Terms and Conditions and Privacy Policy links on Account → My Account page.
Thanks!