Since my last post apparently got lost during the last forum maintenance, I’ll try to recreate it.
I tried to recreate a local MeshBot with a Cloud MeshBot, since you can copy them, which leads to my first question: Will it remain the case that you can only copy Cloud MeshBots, or will this also happen to the local ones at some point?
Then I noticed that there are different capabilities for the same device:
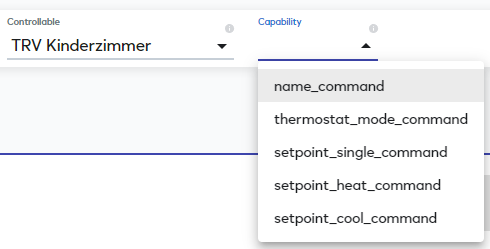
Cloud:
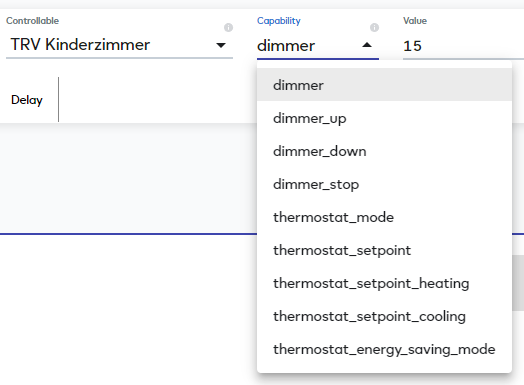
Local:
Which then leads to my second question: Why do the capabilities differ here?
And how can I set the thermostat_setpoint_heating with a Cloud MeshBot? I wasn’t able to set this up with any of the capabilities available.
The device to be adjusted is a Eurotronic Spirit Z-Wave thermostat.
Our team is working to improve and make more clear the list of capabilities, in the meanwhile, is it ok if we troubleshoot your thermostat via support ticket?
We can certainly open a support ticket for the topic of how I plan to do this with a cloud meshbot.
But the question of the difference between local and cloud meshbots and when you should use what and what advantages/disadvantages may be of interest to others. The same applies to the question of why you can only copy cloud meshbots.
We are aware of the situation. We are working on both of the issues.
1- Copy on Local Meshbots is developed on FW now we will do the UI side of it shortly.
2- Capabilities on cloud will be synchronized with local. We are working on to create a comprehensive list to avoid cases like in your case.
So probably in a month we will have both.
Thanks for the feedback.
@cw-kid
Local and cloud meshbots have a different structure as you would understand, there are platform limitations on controller side.
So using meshbots interchangeably is something we can look in longer term.
For the local meshbots to include devices from other controllers case,
This requires all device information and states (which may change in couple of seconds as you may guess) to be synchronized through the controllers at all times, so need some sort of subscription mechanism. Also needs decision on architecture level if one of them should be main and others slave i or same level, etc…
It is a complex architecture. We already started working on it but it will take some time.
Cloud meshbot was already designed just for this purpose. So that you can include all devices from all of your controllers and create meshbots.
1 Like
Best Home Automation shopping experience. Shop at Ezlo!